today 日本語版 2019/1
today 日本語版 2019/1
today 日本語版 2019/1
today 日本語版 2019/1
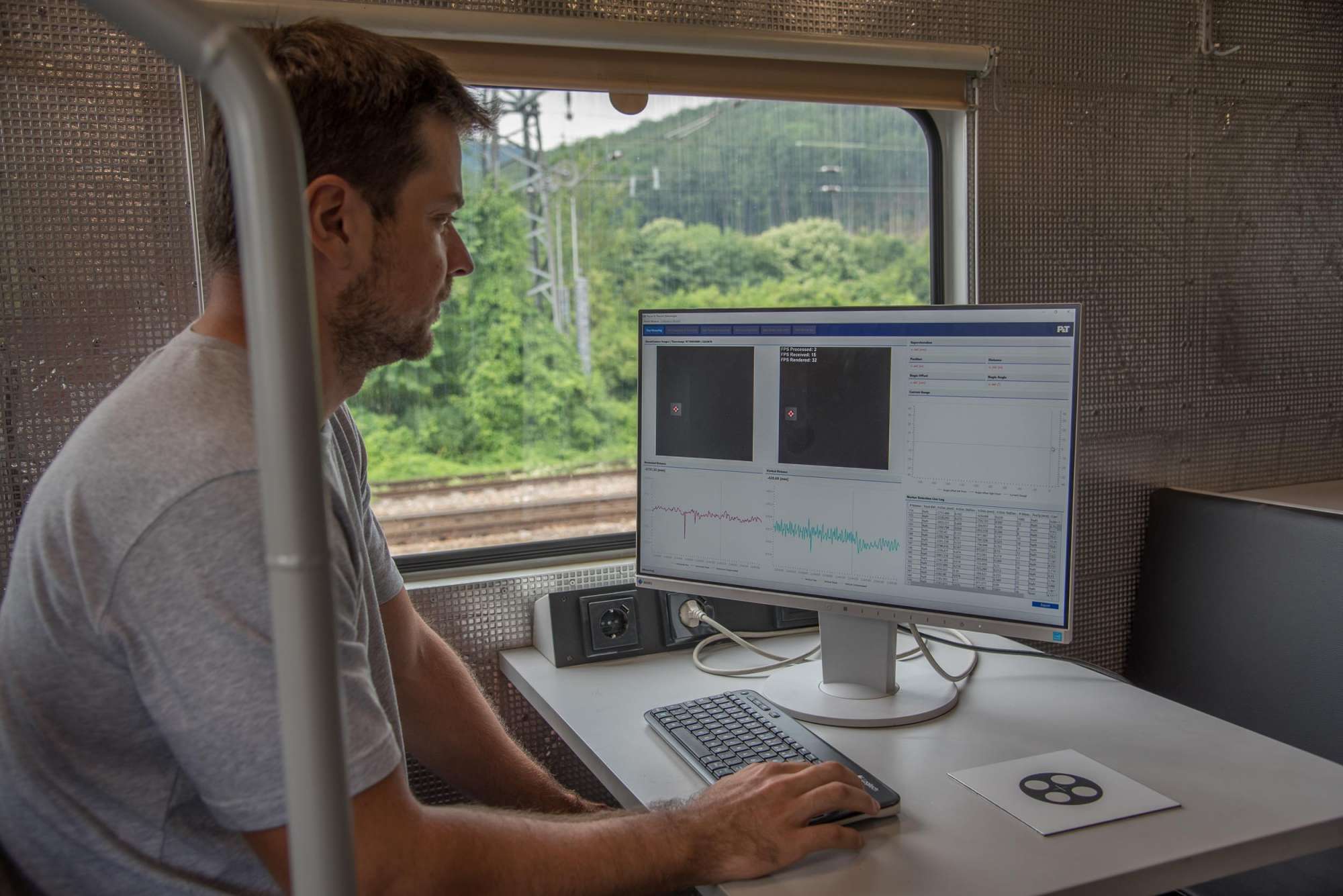
車両に乗り込み、通常の測定走行をしながら、現実に近い条件の下で新しい技術をテストする開発担当者。そこではデータを収集・検証し、得られた結果を用いて新しいシステムの改善を図ります。現場での実際の環境条件(光の具合、バラストの状態、障害物など)は、実験室の中では再現することができません。実務経験を通じてこうした要素を早い段階で取り入れながら、私たちは毎日の運行に役立つ鉄道向けシステムの開発に取り組んでいます。
これまで、保守作業やレール交換の計画に必要なデータは、徒歩巡視や測定走行を行って集めなければなりませんでした。具体的には、測定車輪を持って線路を歩き回り、見つかった支障物をリストアップし、記録写真を撮るという方法です。こうした記録は後日整理し、計画の土台として利用します。その他にも表やCAD図面、関連資料などが記録として残されます。
私たちは現在、線路(軌道、架線、線路周辺環境)に関する総合的なデータ記録のための新しいツールを開発中です。多くの機能を「EM100VT」に搭載し、実際の作業でその性能についてテストを行っています。VTとはVirtual Track、つまり「仮想化された軌道」という意味です。
車両は開発プラットフォームとして利用され、デジタルデータを活用した製品開発の重要な基盤となっています。すでに数々の測定ユニットが実際に使われていますが、一部は開発段階にあり、試験中です。これで2018年下期以降、体系的な情報記録管理と線路のデジタル化は現実となります。
現在、当社の従来型測定装置を用いたさまざまな新しい技術を、EM100VTを使ってテストしているところです。
軌道線形を確認する際、当社の検測車EMシリーズでおなじみの測定システム(囲み記事参照)が利用されます。
この非接触式の軌道線形測定システムは、内臓GPSナビと二重光学式軌間測定装置(Dual OGMS)を搭載しています。軌道線形の測定データを記録し、それを相対的空間曲線で表すというものです。
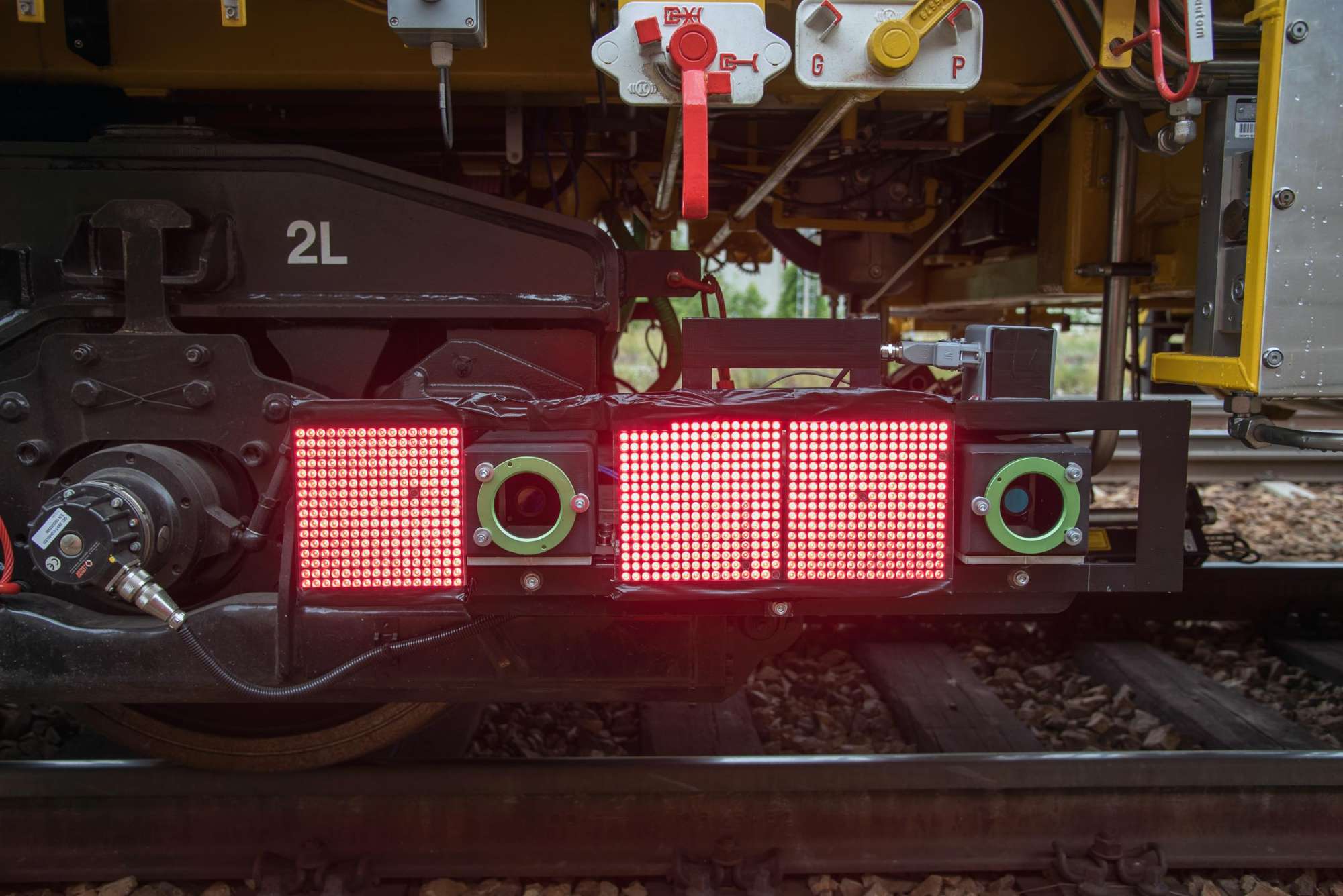
絶対軌道線形の検測では、図柄を使った新しいタイプの基準点を、車両の側面に装備された2台のステレオカメラで撮影します。その際、時速100キロまでスピードを出すことができます。これらの特殊カメラには、標準化された照明環境(正確な位置に調整された照射角度、発光波長など)を作るLEDライトが装備されています。固定点の位置(高さ、距離)情報は、リアルタイムで算出されます。フレームレートは最大200fps、画像サイズは5MBという大量のデータを常に処理・同期させなければなりません。長期にわたって保存するのは、実際に必要なデータだけです。
基準点では、さまざまなグラフィックパターンや素材をテストしました。基準点の表面は逆反射します。つまり、照射された光が光源またはカメラに向かって反射し、日光など他の光源からの光による影響は、最小限に抑えられます。この新しい基準点は、IMUの定期的な調整(ドリフト補正)のための同期点となるなど、複数の用途に対応することもできます。
2018年秋より、この測定システムはイタリアでの機械の試運転でテストされています。実作業で使用することにより、貴重なデータを取得できます。イタリア国鉄の管理会社であるレーテ・フェッロヴィアーリア・イタリアーナ(RFI)社が導入したのは、スポットタンピング用機械「Unimat Combi 08-275」1台です。この機種には当社の検測台車が搭載されており、新しい基準点測定システムの実験に大変役立っています。
EM100VTには、GNSS(GPS)による位置情報を取得するための新型マルチアンテナ測定システムが初めて搭載されています。軌道状態をミリ単位で測るために、開発が進む衛星測量技術をどこまで利用できるのか、私たちは実地試験で検証しているところです。現在開発中の欧州の衛星測位システム「ガリレオ」についても、検測精度を調べています。
測位システムは、時速100キロまでの走行速度にも適し、合計4基のGPSアンテナを使って作動します。精度向上のため、これらのアンテナは防振構造となっている運転室部分の屋根から離し、専用フレームを用いて車体フレームに固定されています。
主アンテナは、当社の慣性測定システムに標準装備されています。これに4基のアンテナを追加することで、はるかに正確な測位結果を得ることができます。通常GPSで生じる誤差が少なくてすみ、より質の高いデータが得られるというわけです。
あと数年もすれば、私たちが開発した測定・記録技術が、全ての鉄道建設機械に利用されるようになるかもしれません。
フロリアン・アウアー
プラッサー&トイラー社
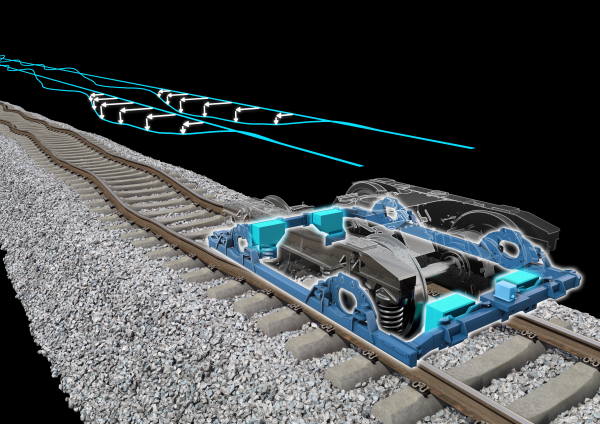
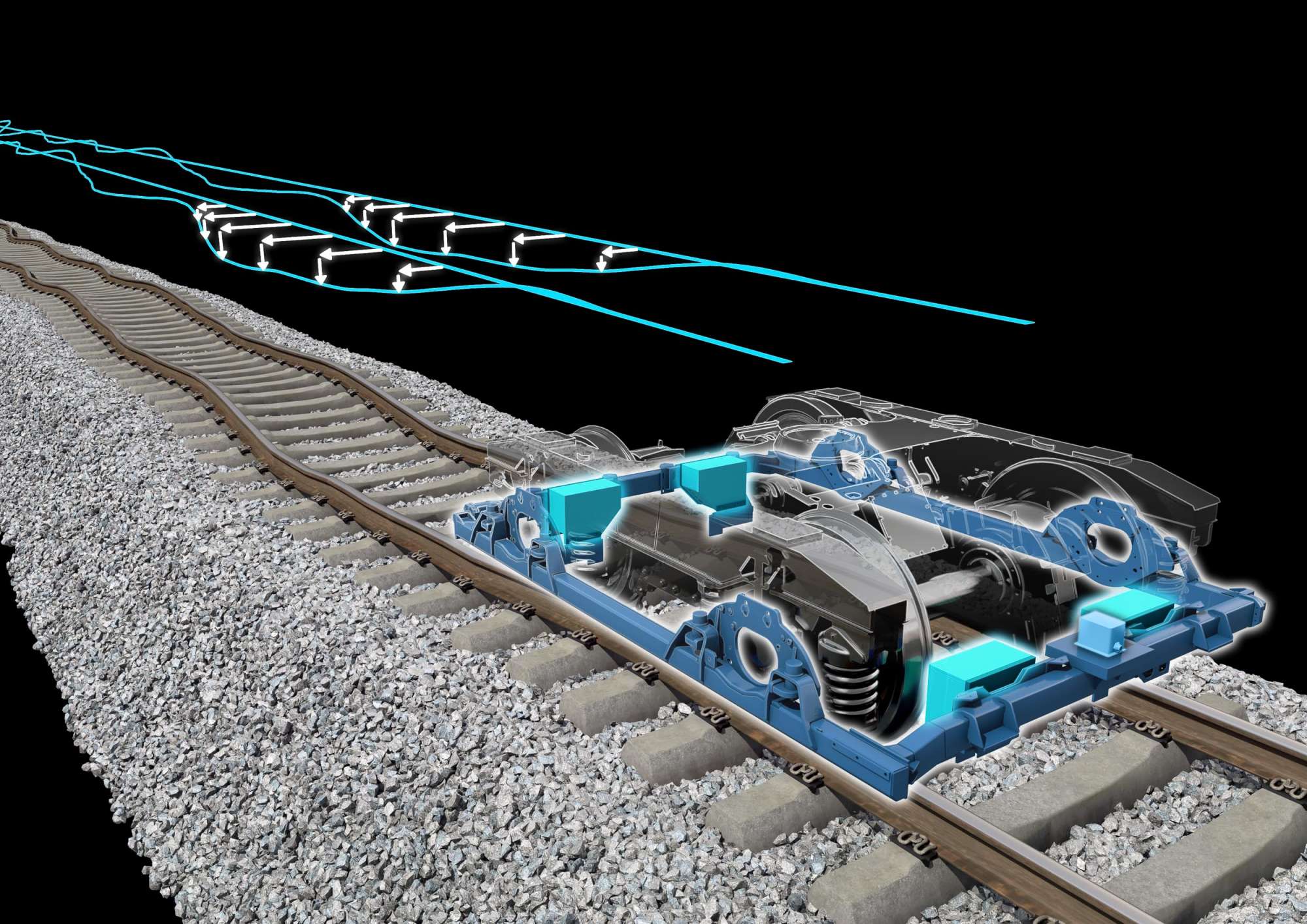
プラッサー&トイラー社の検測車には、いずれも検測台車が標準装備されています。軌道線形の測定・記録・分析の機械化と自動化に大きく貢献したのが、この検測台車です。最近では、この測定技術がマルタイにも搭載されるケースが増えています。たとえば、イタリアで導入されたスポットタンピング用機械「Unimat Combi 08-275」などがあります。
検測台車には、4個のアクスルベアリングで固定された測定フレームがあります。そこに慣性計測装置(IMU)と、二重光学式軌間測定システム(Dual OGMS)の計4台の測定センサーが搭載されています。全体的に非常に頑丈な構造となっています。この配置でフレーム、IMU、センサーが常にレール表面と平行して移動するため、測定フレームを軌道検測の基準線として参考にすることができます。
測定走行中、台車が軌道に負荷をかけることから、このような構造であれば現実的な負荷条件の下で軌道線形の測定を行うことができます。バネのストロークや車体の揺れを補正する必要もありません。このシステムなら、車両が停止状態でも最高速度で走行していても、きわめて正確に検測を行うことができます。
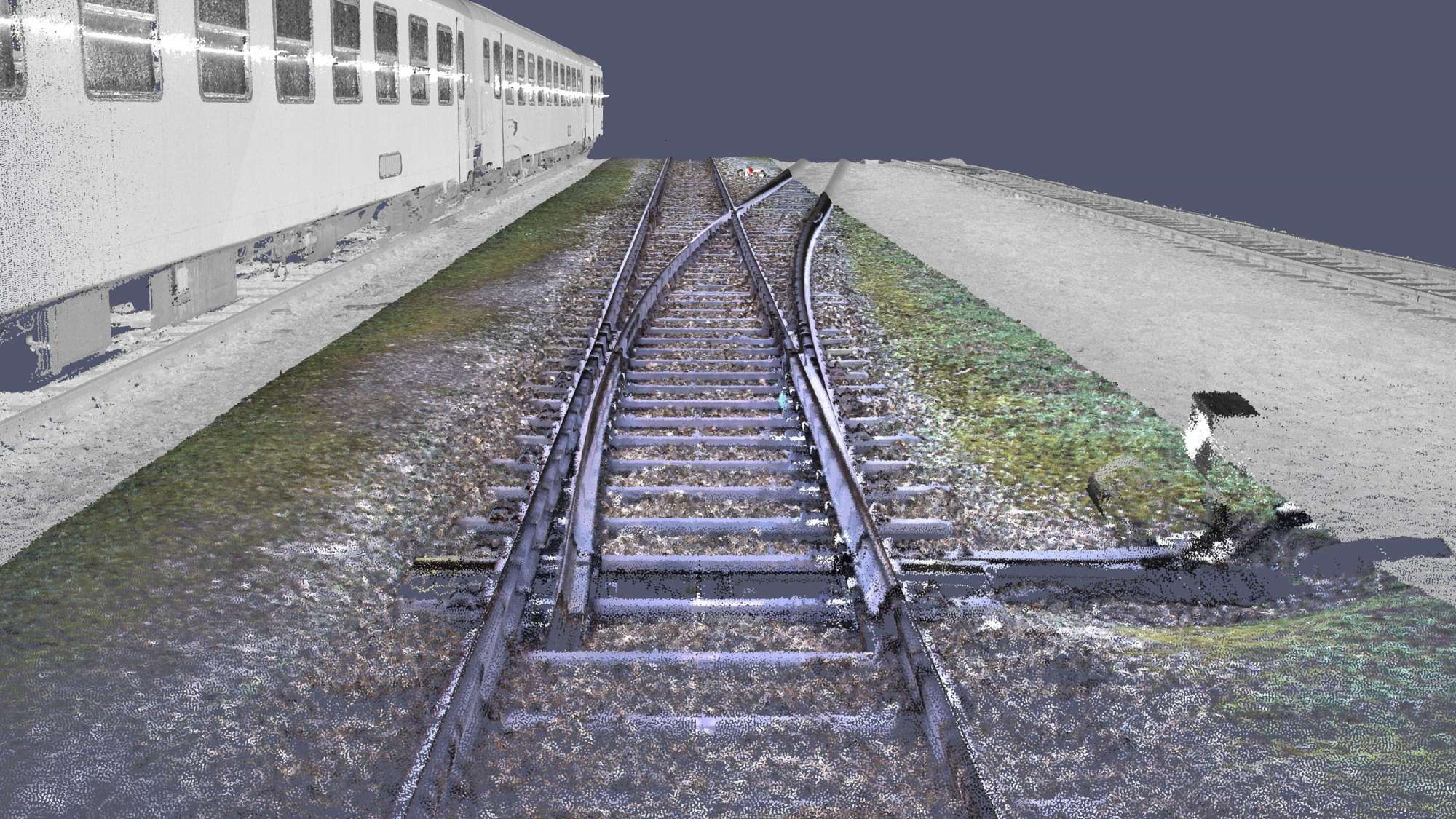
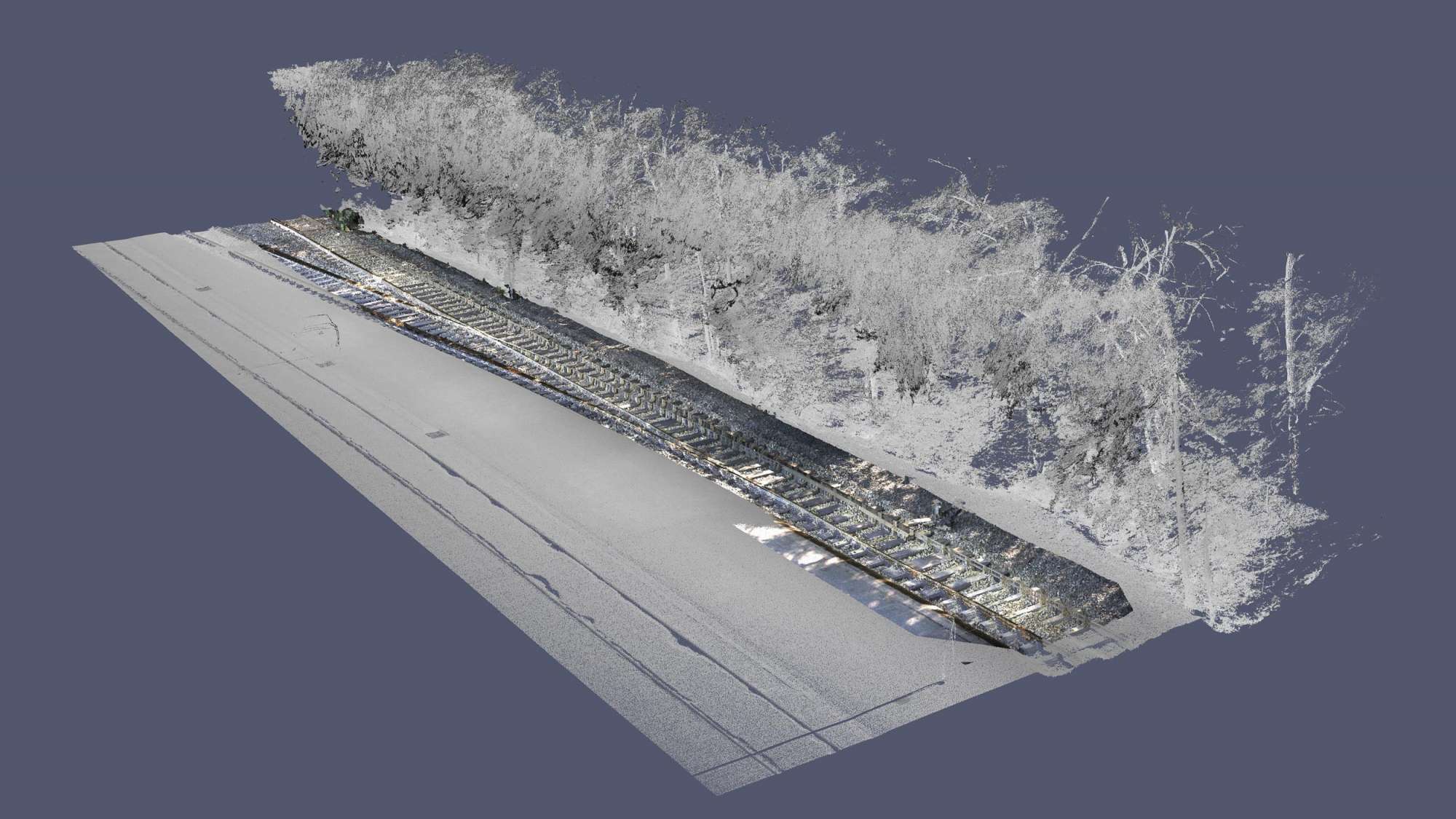
3次元データの収集(モバイルマッピング)には、いろいろな技術が用いられています。毎秒100万点を計測できる回転レーザースキャナー2台がデータを取り込み、それを元に解像度の高いグレースケールの3D点群データが生成されます。スキャナーはいずれも毎秒250回転します。つまり、毎秒250回のスキャンが行われているということです。また、全方位式カラースキャナーからは、点群データと合致する360度のカラー画像を取得できます。
このモバイルマッピングシステムでは、非常に有用な3次元データの取得が可能です。スキャナーの設置位置やレーザー入射角度がよいことから、軌道の脇の垂直面まで高精度の測定ができます。点群データからの物体の認識は、人工知能を用いて行われます。
取得したデータは、全てデジタルツインに利用できるようにします。その際、絶対軌道線形(固定点)と相対軌道線形(軌道線形、空間曲線)と、GNSS(GPS)による位置情報とを比較します。このように照合することで、全体的なデータの正確さがさらに高まるというわけです。
国際鉄道連合(UIC)は、鉄道網に関する国際的なデータ交換やデータ利用のために、独自のネットワークモデル「RailTopoModel」を考案しました。
RailTopoModelは、総合的な概念データモデルです。体系的にまとめられていることから、たった一つのデータモデルで複数の鉄道アプリケーションをサポートすることができます。データ交換を簡単に行うための主なアプリケーションは、次の通りです。
RailTopoModelは、鉄道関連事業者間のデータ交換が迅速かつ効率的に行われることを目指しています。
プラッサー&トイラー社では、RailTopoModelの「スーパーナノ」高精度地図情報レベルを活用しながら、デジタルツインのためのデータ収集処理を行っています。