actual 134
actual 134
actual 134
actual 134
Para desarrollar y probar los componentes tecnológicos de las máquinas del futuro, Plasser & Theurer necesita unas condiciones realistas para los ensayos. Utilizamos el EM100VT como vehículo portador, ya que ofrece las condiciones ideales para ensayar innovaciones tecnológicas con un alto potencial de aplicabilidad.
En pocos años, la tecnología de medición y registro que estamos desarrollando aquí se podrá aplicar a cualquier máquina de construcción de vía.
Florian Auer
Director de Tecnología & Innovación, Plasser & Theurer
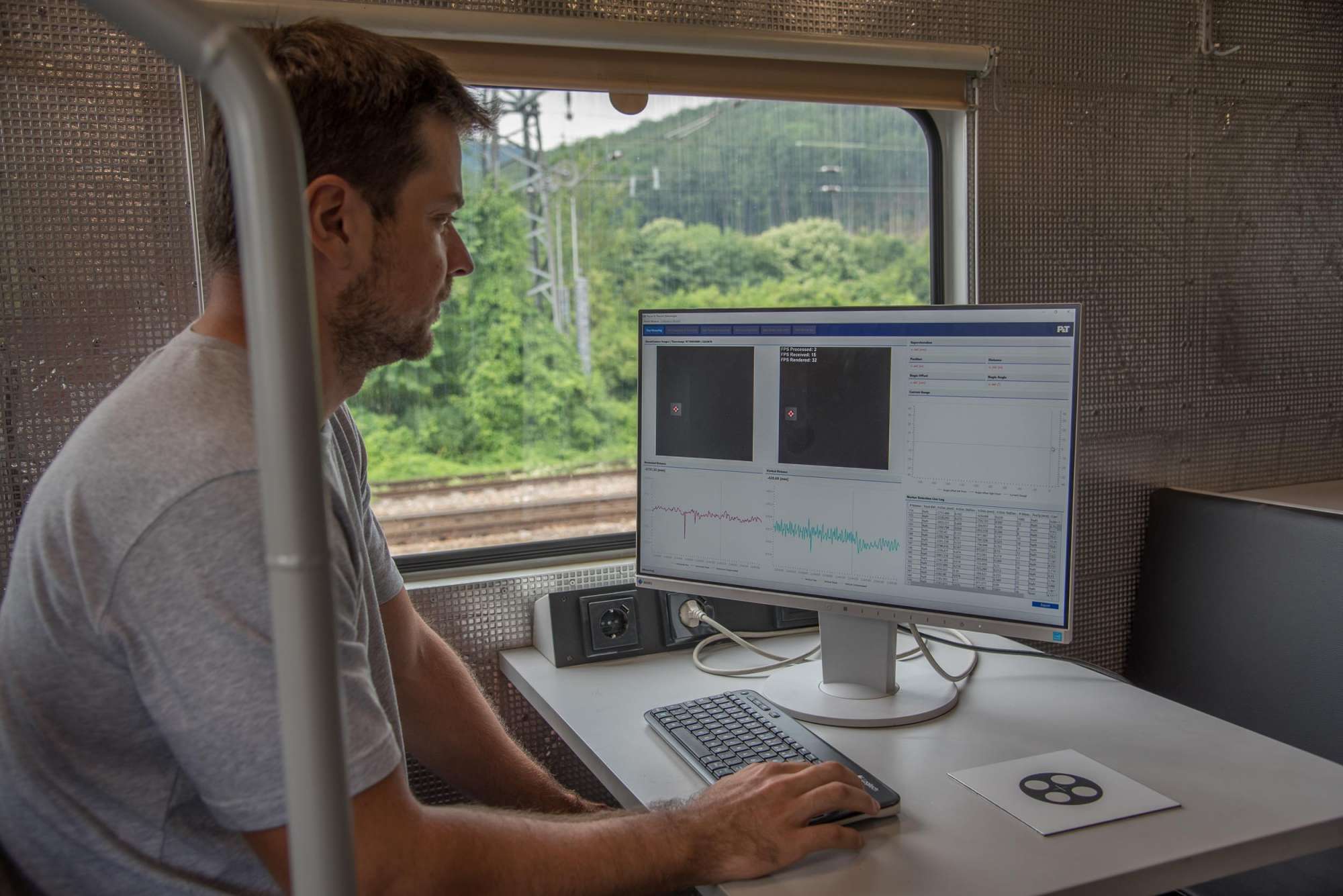
Los desarrolladores viajan directamente en el vehículo y realizan ensayos bajo condiciones reales durante los recorridos de medición regulares. Aquí recopilan y verifican los datos que permitirán mejorar los nuevos sistemas. Las condiciones reales de una obra (iluminación, estado del balasto, obstáculos, etc.) no pueden reproducirse en un laboratorio. Pero las experiencias prácticas pueden integrarse en una fase temprana con objeto de desarrollar sistemas resistentes y aptos para el ferrocarril.
Hasta ahora, los datos necesarios para la planificación de los trabajos de mantenimiento o de las renovaciones tenían que recopilarse mediante inspecciones in situ y viajes de medición. Para ello se tiene que recorrer el tramo con un odómetro y crear un listado de obstáculos y una documentación fotográfica. Este expediente será revisado más adelante y, una vez completado con tablas, planos y otro tipo de documentos, constituye la base para la planificación.
Nuevas herramientas para el registro integral de la superestructura física (vía, línea aérea de contacto y el entorno de la vía) se encuentran en desarrollo. Muchas están instaladas actualmente en el EM100VT (VT significa Virtual Track) para probarlas en la práctica.
Este vehículo se utiliza como plataforma de investigación y es fundamental para el desarrollo de productos digitales. Numerosos componentes de medición ya están en servicio regular, otros en desarrollo o en la fase de ensayos. A partir del segundo semestre de 2018, el registro y la digitalización sistemáticos de la superestructura se harán realidad.
En la actualidad, los ensayos con el EM100VT se centran en nuevos desarrollos combinados con nuestros conocidos sistemas de medición:
Para determinar la geometría de la vía se utiliza nuestro acreditado sistema de medición, presente en muchos de nuestros vehículos de medición de la serie EM (ver recuadro).
Este sistema sin contacto con navegación GPS integrada y medición óptica del ancho de vía (OGMS Dual) escanea la geometría de la vía. El resultado son curvas espaciales 3D relativas.
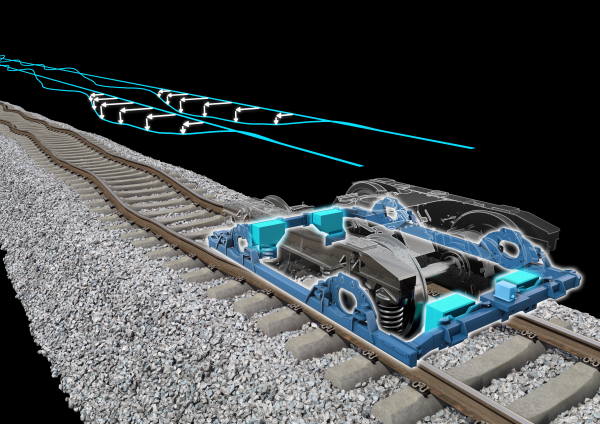
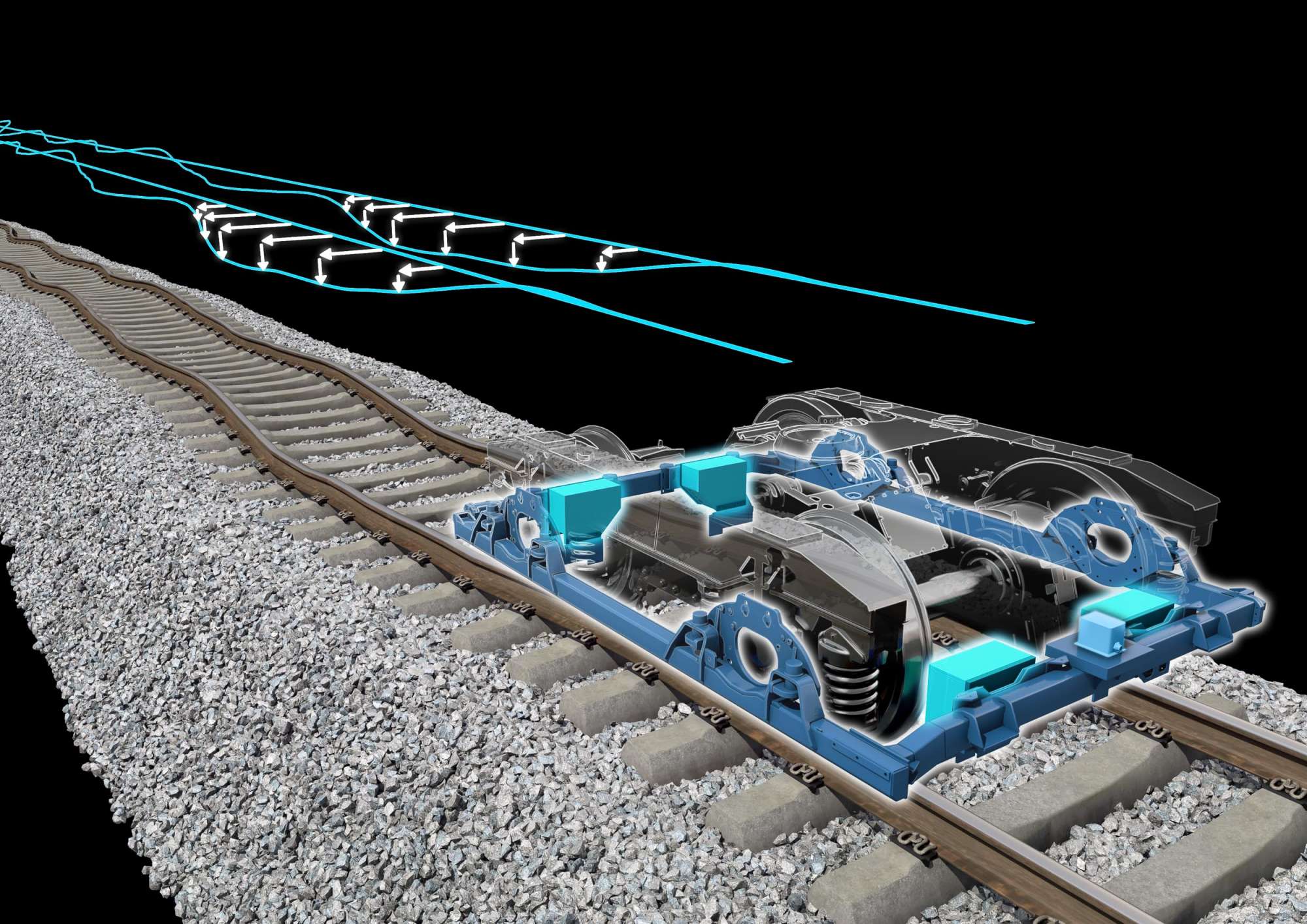
Una aportación esencial a la mecanización y automatización de la medición, el registro y el análisis de la geometría de la vía es nuestro bogie de medición, con el que están equipados de serie todos los vehículos de medición de Plasser & Theurer. Actualmente, esta tecnología de medición se está integrando progresivamente también en las bateadoras, como p.ej. en una Unimat Combi 08-275 para la reparación de errores individuales en Italia.
El bogie está equipado con un bastidor de medición fijado a los cuatro cojinetes de los ejes. Sobre este bastidor se encuentran la unidad de medición inercial (IMU), así como un total de cuatro sensores pertenecientes al sistema de medición del ancho de vía doble (OGMS Dual). La estructura de la máquina es extremadamente robusta. Gracias a esta disposición, el bastidor, la IMU y los sensores son guiados en paralelo a las superficies de los carriles, razón por la cual el bastidor de medición sirve de plano de referencia para la medición.
Dado que durante el viaje de medición el bogie está ejerciendo una carga, la medición de la geometría de la vía se realiza bajo una carga realista, siendo innecesaria una compensación de la amortiguación o de las oscilaciones de la caja del vehículo. El sistema proporciona la máxima precisión de medición desde la parada total hasta la velocidad máxima.
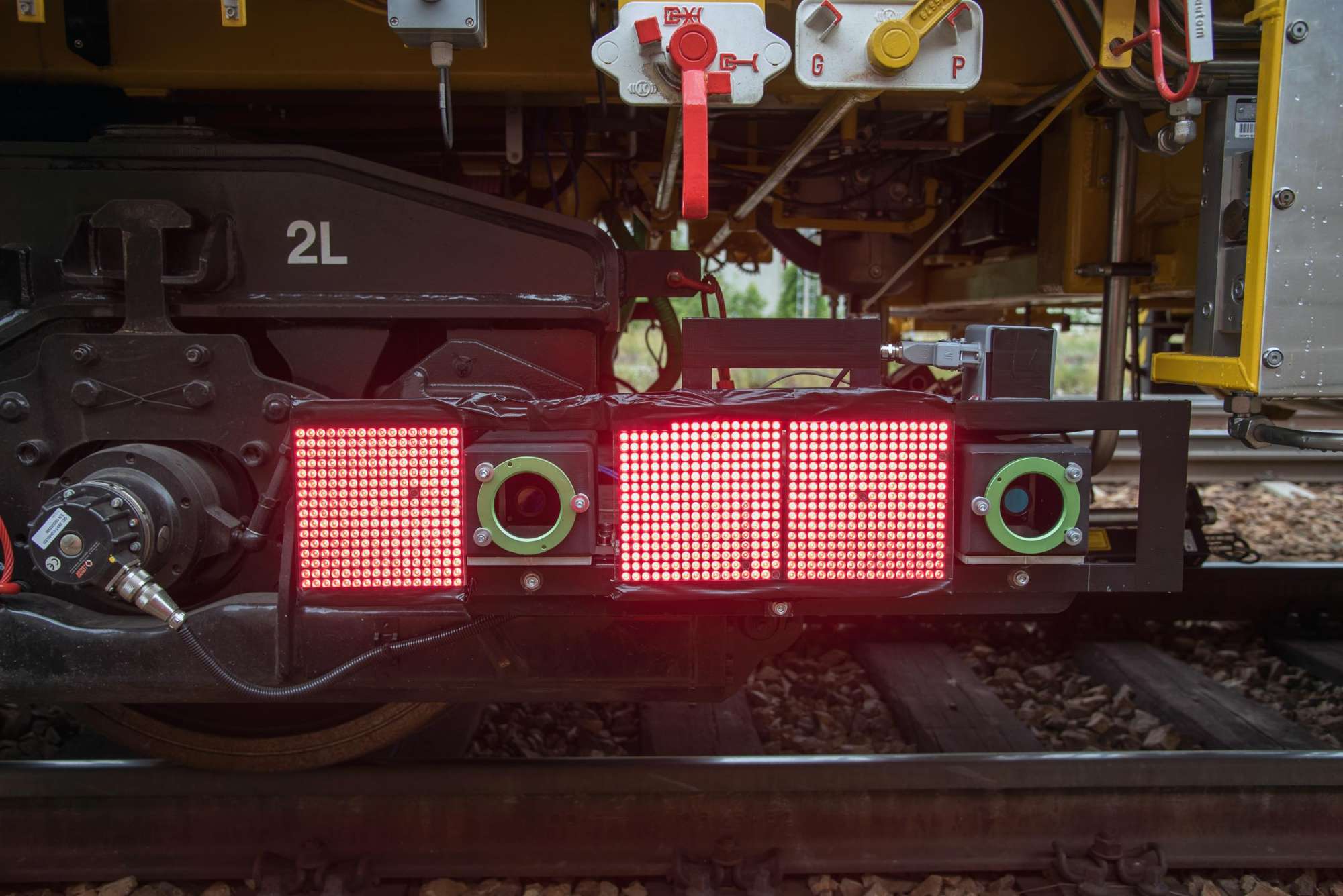
Unos innovadores puntos de referencia gráficos son reconocidos hasta a 100 km/h por cámaras 3D situadas en el lateral del vehículo. Paneles de luz LED crean una iluminación estandarizada (ángulo de los haces, longitud de onda, etc., ajustados con precisión) para las dos cámaras especiales. La posición de los puntos fijos (altura, distancia) es calculada en tiempo real. Una frecuencia de muestreo de hasta 200 imágenes por segundo con una resolución de 5 MB requieren el procesamiento continuo de grandes volúmenes de datos. Solo son almacenados de forma permanente los datos realmente necesarios.
Para los puntos de referencia se ensayaron diferentes materiales y patrones gráficos. Finalmente, su superficie es retrorreflectante, es decir, el haz de luz incidente es reflejado hacia su fuente, la cámara, y las fuentes externas como el sol molestan lo mínimo posible. Los nuevos puntos de referencia podrían incluso cumplir una función múltiple en caso de utilizarlos también para el ajuste periódico de la IMU (ajuste de la deriva).
A partir de otoño, este sistema de medición será puesto a prueba en el marco de un ensayo en una línea en Italia y proporcionará valiosas experiencias de uso en la práctica. Rete Ferroviaria Italiana (RFI), el administrador de infraestructuras de los ferrocarriles estatales italianos, opera una flota de máquinas del tipo Unimat Combi 08-275 para la reparación de errores individuales. Todas están equipadas con nuestro bogie de medición y son idóneas para realizar ensayos con este nuevo sistema de medición por puntos fijos.
El EM100VT también estrena un novedoso sistema de medición con antenas múltiples para determinar la posición GNSS/GPS. En un ensayo práctico se comprobará en qué medida es posible aplicar los nuevos desarrollos en el campo de la topografía por satélite a determinar la posición de la vía con precisión milimétrica. También se analizará la precisión del sistema de navegación por satélite europeo Galileo, aún en desarrollo.
El sistema de geolocalización es apto para velocidades de hasta 100 km/h y trabaja con un total de cuatro antenas GPS instaladas sobre un bastidor propio, desacoplado de la caja amortiguada de la cabina y fijado al bastidor de la máquina a fin de lograr una mayor precisión.
La antena principal forma parte del equipamiento estándar de nuestro sistema de medición inercial, pero con cuatro antenas adicionales pueden lograrse resultados mucho más exactos. Las tolerancias de las referencias GPS habituales se reducen notablemente – la calidad de los datos aumenta.
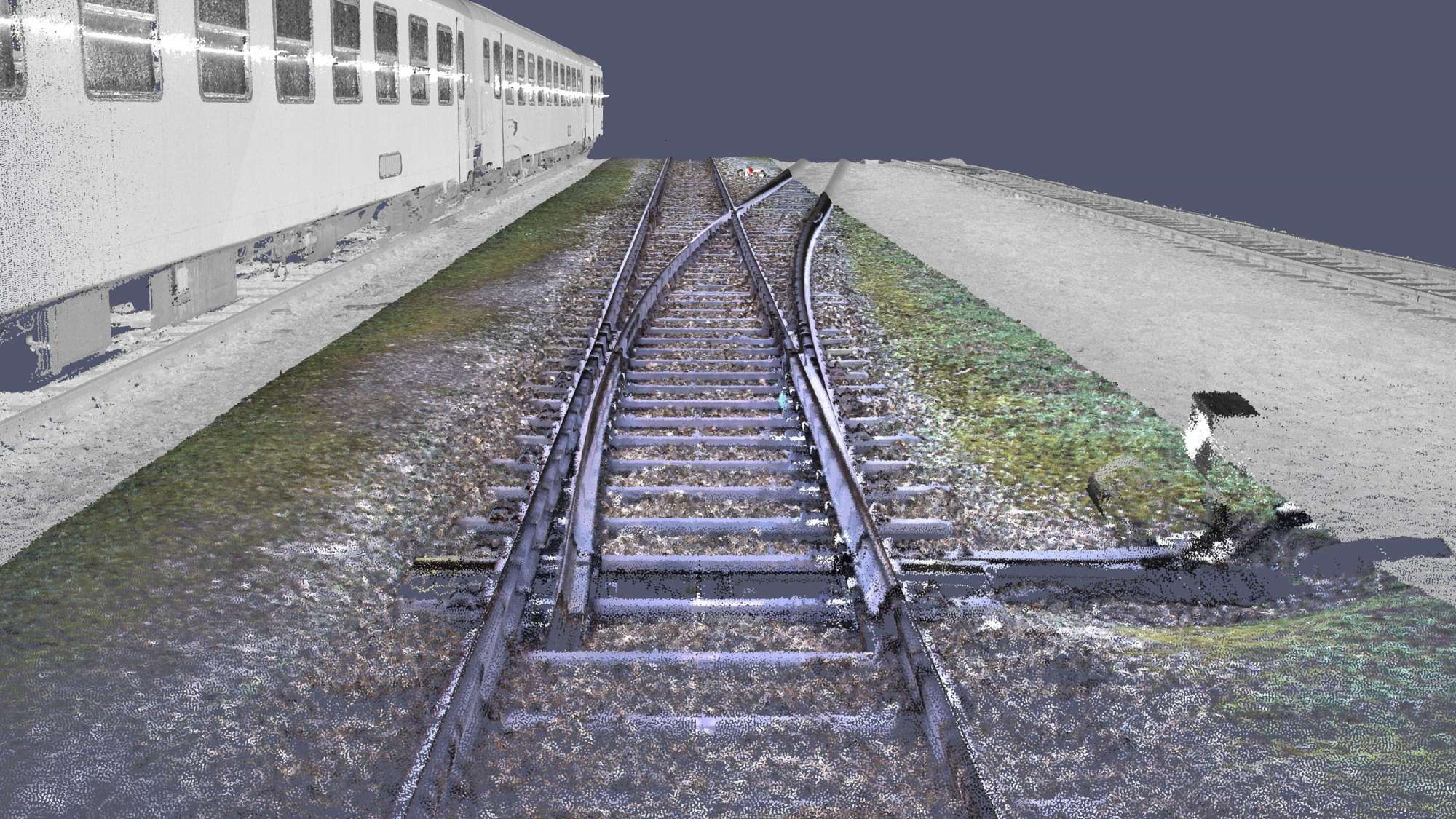
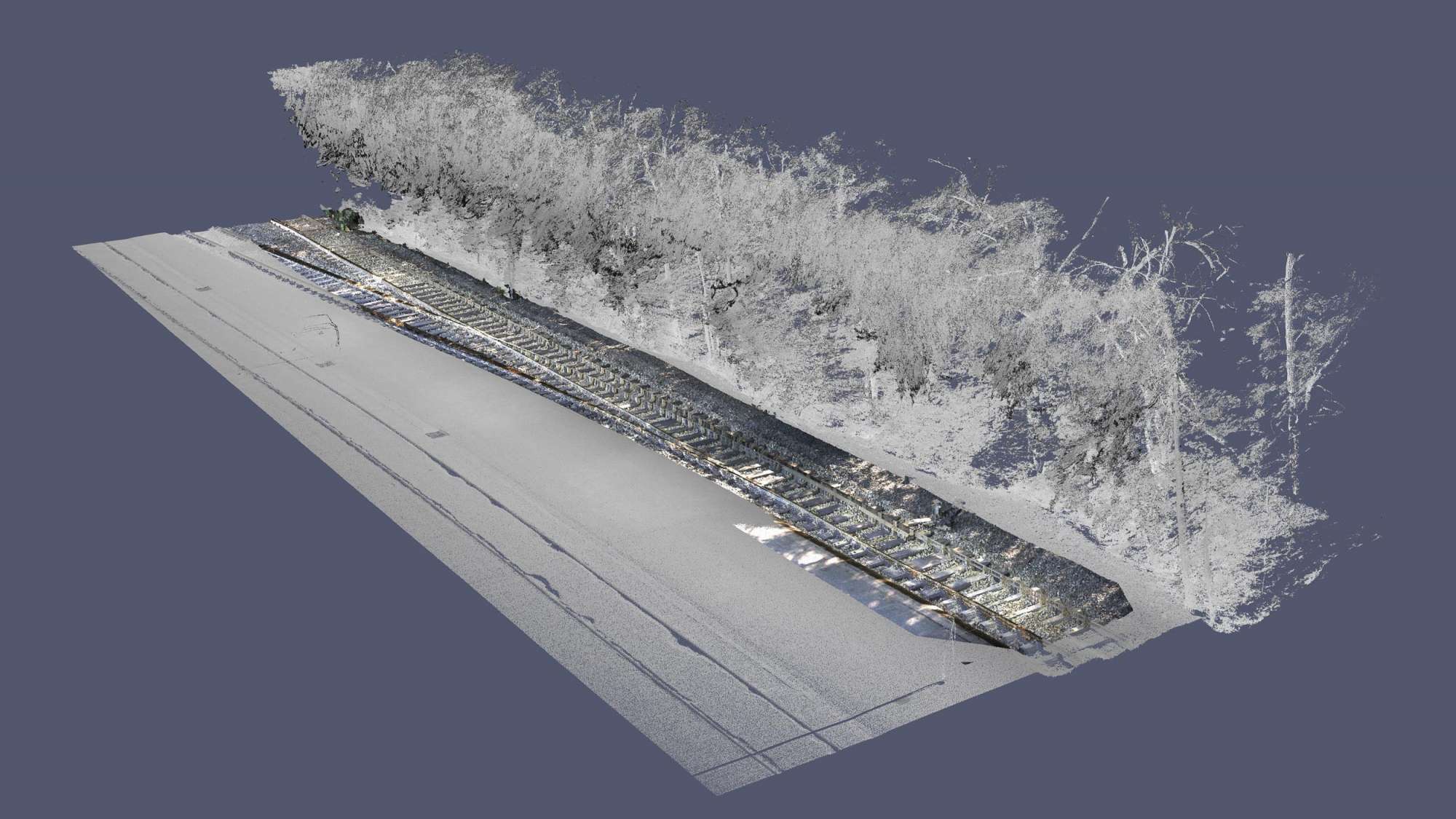
Para el registro de datos en 3D (Mobile Mapping) se utilizan diferentes tecnologías:
Dos escáneres láser rotativos, con una velocidad de captación de datos de un millón de puntos por segundo, que generan una nube de puntos 3D de color gris en alta definición. Cada escáner gira a 250 revoluciones por segundo, lo que equivale a 250 barridos por segundo.
El escáner rotativo cromático genera una imagen en color con un ángulo de 360 grados que encaja a la perfección.
Este sistema de escaneo de datos 3D, denominado Mobile Mapping, es una herramienta muy poderosa. Mediante el posicionamiento adecuado de los escáneres y la inclinación de los planos de exploración, se pueden capturar con exactitud incluso superficies verticales alejadas de la vía. La inteligencia artificial se utiliza para identificar objetos a partir de las nubes de puntos.
El objetivo consiste en suministrar al Digital Twin todos los datos recopilados. Para ello se compara la geometría externa de la vía (puntos fijos) y la geometría interna (geometría de la vía, curvas espaciales) con los datos georreferenciados GPS/GNSS. Esta comparación mejora aún más la exactitud de los datos en su conjunto.
La Unión Internacional de Ferrocarriles ha desarrollado un modelo de red propio, el RailTopoModel, para el intercambio y el uso global de datos de las redes ferroviarias.
RailTopoModel es un modelo conceptual y general que, gracias a su descripción estructurada, ofrece la posibilidad de dar soporte a diversas aplicaciones ferroviarias con un único modelo de datos. He aquí algunos ejemplos de las aplicaciones más importantes para el intercambio simplificado de datos:
El objetivo de RailTopoModel es lograr un intercambio rápido y eficiente entre todos los actores involucrados en el ferrocarril.
Nuestro sistema de recopilación y tratamiento de datos para el Digital Twin trabaja en el nivel de visualización extremadamente detallado Super-Nano del RailTopoModel.