today 142
today 142
today 142
today 142
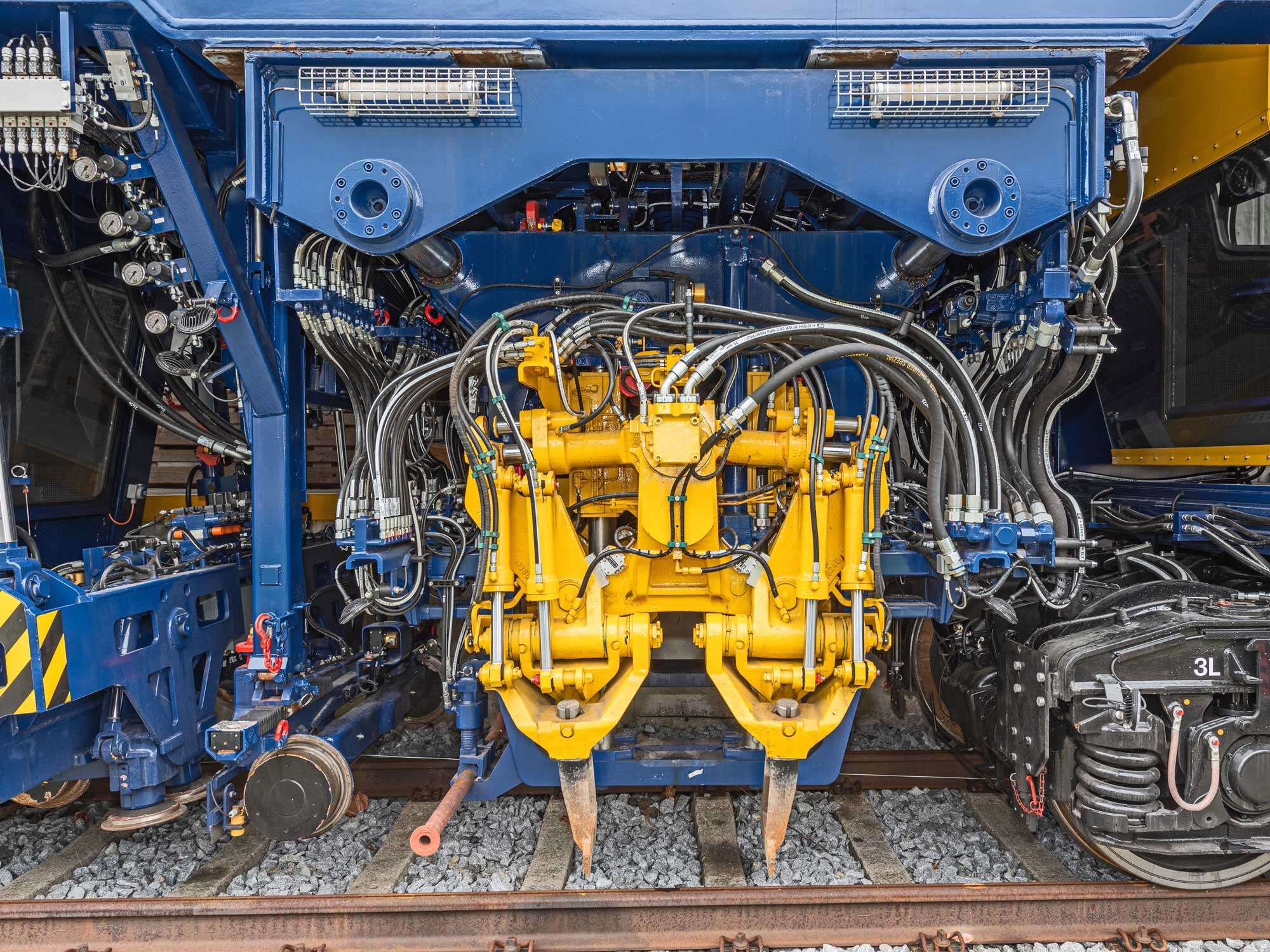
For over 70 years, Plasser & Theurer tamping machines have been the global standard in terms of efficiency and performance. The non-synchronous constant pressure tamping principle enables optimum ballast compaction while protecting the material at the same time.
The introduction of the continuous work method in the 1980s marks another milestone in track maintenance. Compared to cyclic-action machines, the entire tamping machine moves at a constant speed, while only the satellite carrying the tamping units and the lifting and lining unit remains above the tamping spot. This innovative design saves time and energy, as it is not necessary to accelerate or decelerate the entire machine mass.
The advanced sensor technology on the tamping units enables operators to obtain additional information during the tamping process. With Plasser TampingControl – BallastMonitoring, the condition of the ballast can be detected directly during the penetration phase. This allows the tamping parameters to be precisely adapted to the conditions and significantly improves the work result. The VoidDetection function of Plasser TampingControl provides information on whether the void created during lifting is sufficiently filled with ballast or whether another squeezing process is required. The void must be filled sufficiently. Only then is it possible to compact it sustainably and create a stable sleeper bed. This technology therefore significantly contributes to the stability of the track.
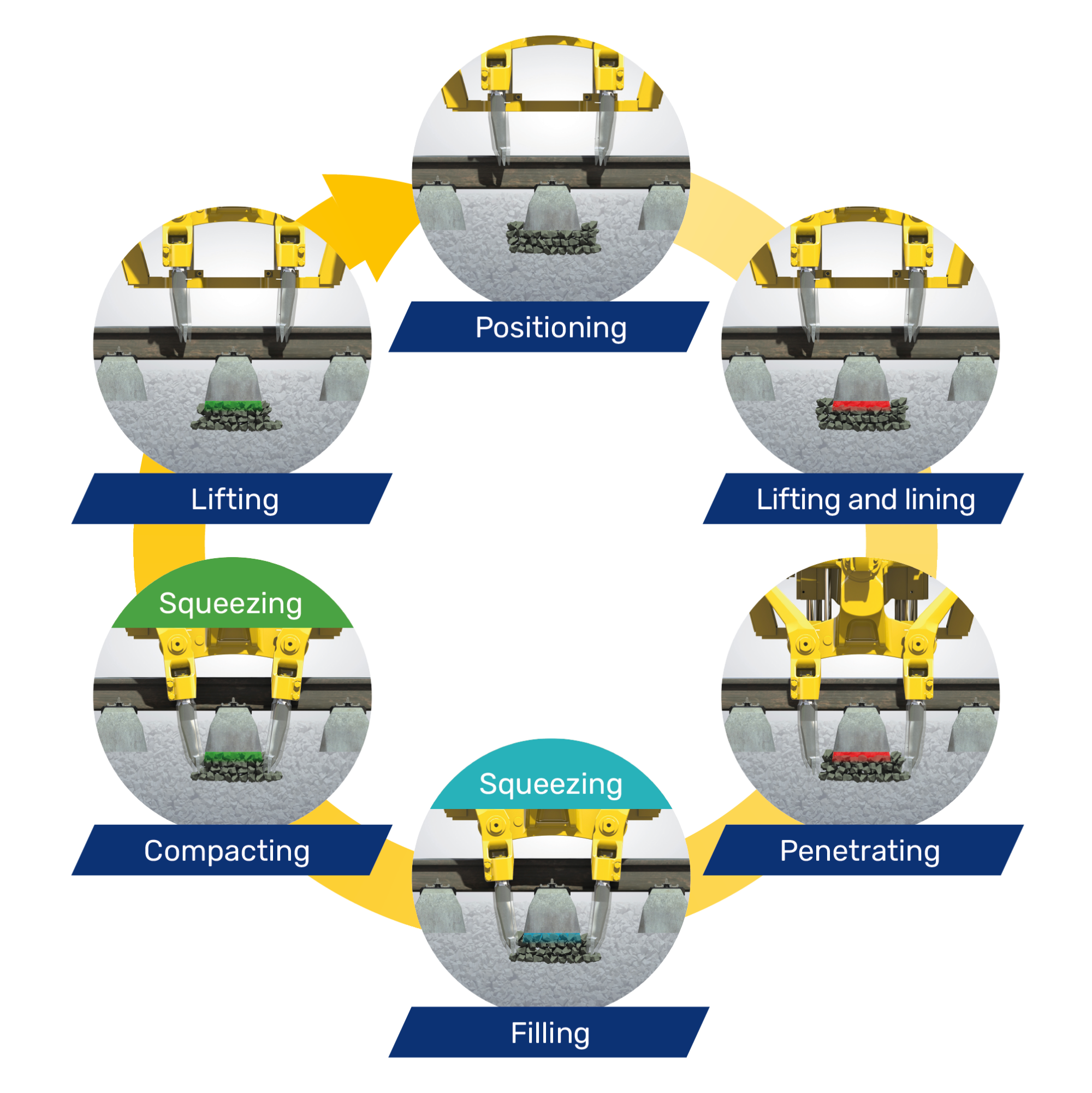
THE TAMPING PROCESS
Regardless of the machine and work unit used, the tamping process can be divided into different phases. Together, they form a tamping cycle. The individual steps are repeated cyclically during the maintenance of a track section. In the following, we describe a tamping process using a 1-sleeper tamping unit.
The aim of every tamping process is optimum filling and compaction below the sleeper, which forms the basis of a precise, long-lasting track geometry.
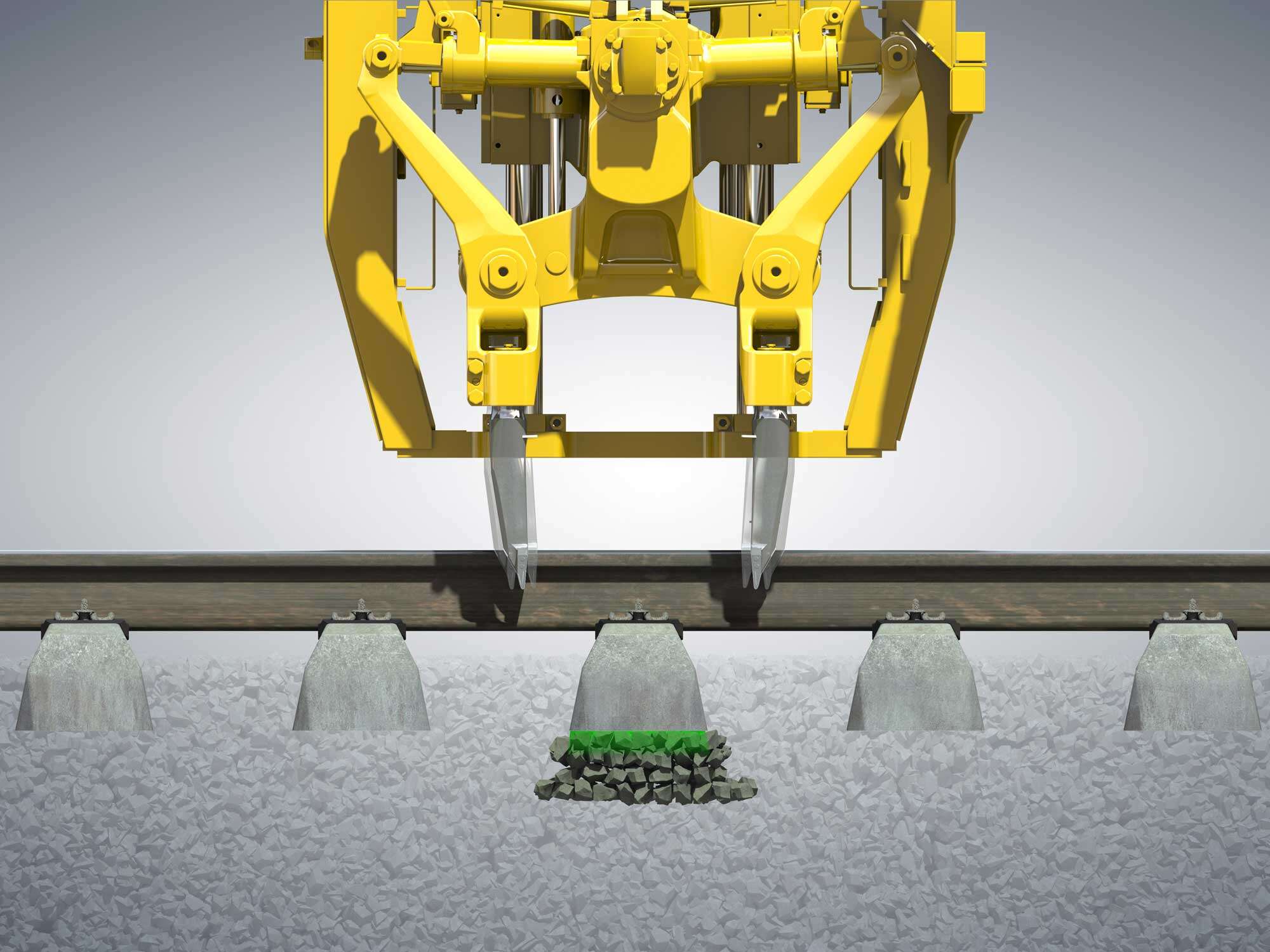
> Positioning
At the beginning of a tamping cycle, the tamping unit is positioned above the sleeper to be maintained. In the case of cyclic-action tamping machines, the machine is stopped as soon as the tamping unit is in the desired position along the track centreline. With continuous-action tamping machines, the tamping unit is positioned along the track centreline by stopping the satellite while the machine moves forward continuously. On the one hand, this technology saves energy, as the large mass of the machines does not have to be cyclically stopped and accelerated again. On the other hand, the fast positioning of the satellite enables higher output.
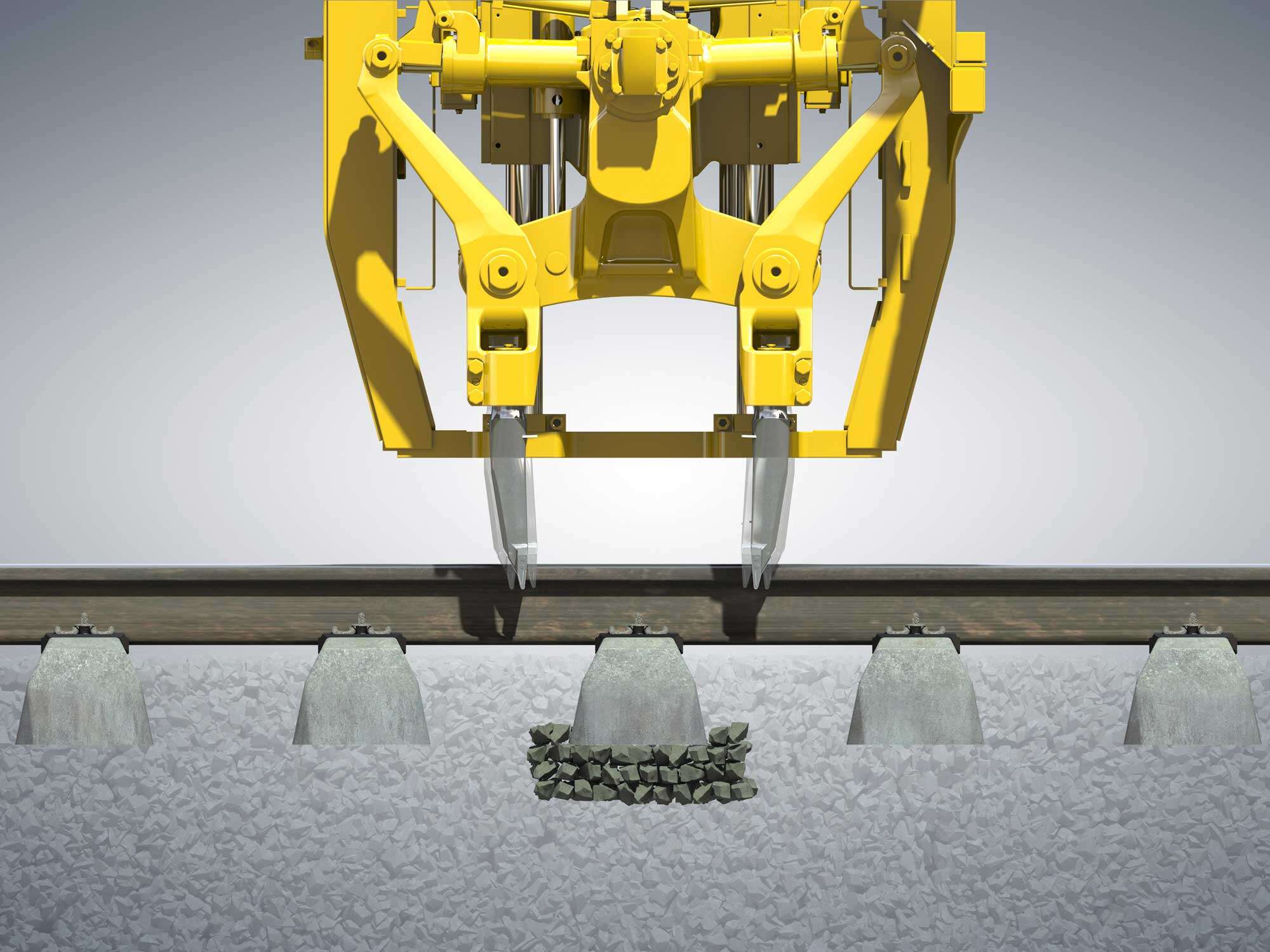
> Lifting and lining
To correct the track position or to create the desired position, the track is lifted and lined in the next step. The rails are gripped with hooks or roller lifting clamps and moved hydraulically. Shifting and lifting beyond the desired final value can be carried out to match the settlement movements after tamping and to achieve the target value. This is referred to as over-lining or over-lifting. The Plasser TampingAssistant Basic uses AI to configure and position the lifting and lining unit.
> Penetrating
During lifting and lining, the tamping unit is lowered hydraulically into the ballast. The frequency control facilitates penetration by increasing the frequency and it reduces wear on the tamping units. A newly developed penetration control adapts to the ballast conditions step by step and ensures high penetration dynamics and precise achievement of the set tamping depth.
The pilot control is continuously adapted in order to take into account individual soil conditions, from loose new layers after track laying and renewal to hard ballast beds during maintenance work. This ensures both constant penetration time and precise achievement of the set tamping depth under various operating conditions without operators having to intervene.
Plasser TampingControl – BallastMonitoring is a technology allowing additional conclusions to be drawn about the ballast condition by analysing the interaction between ballast and work units during penetration.
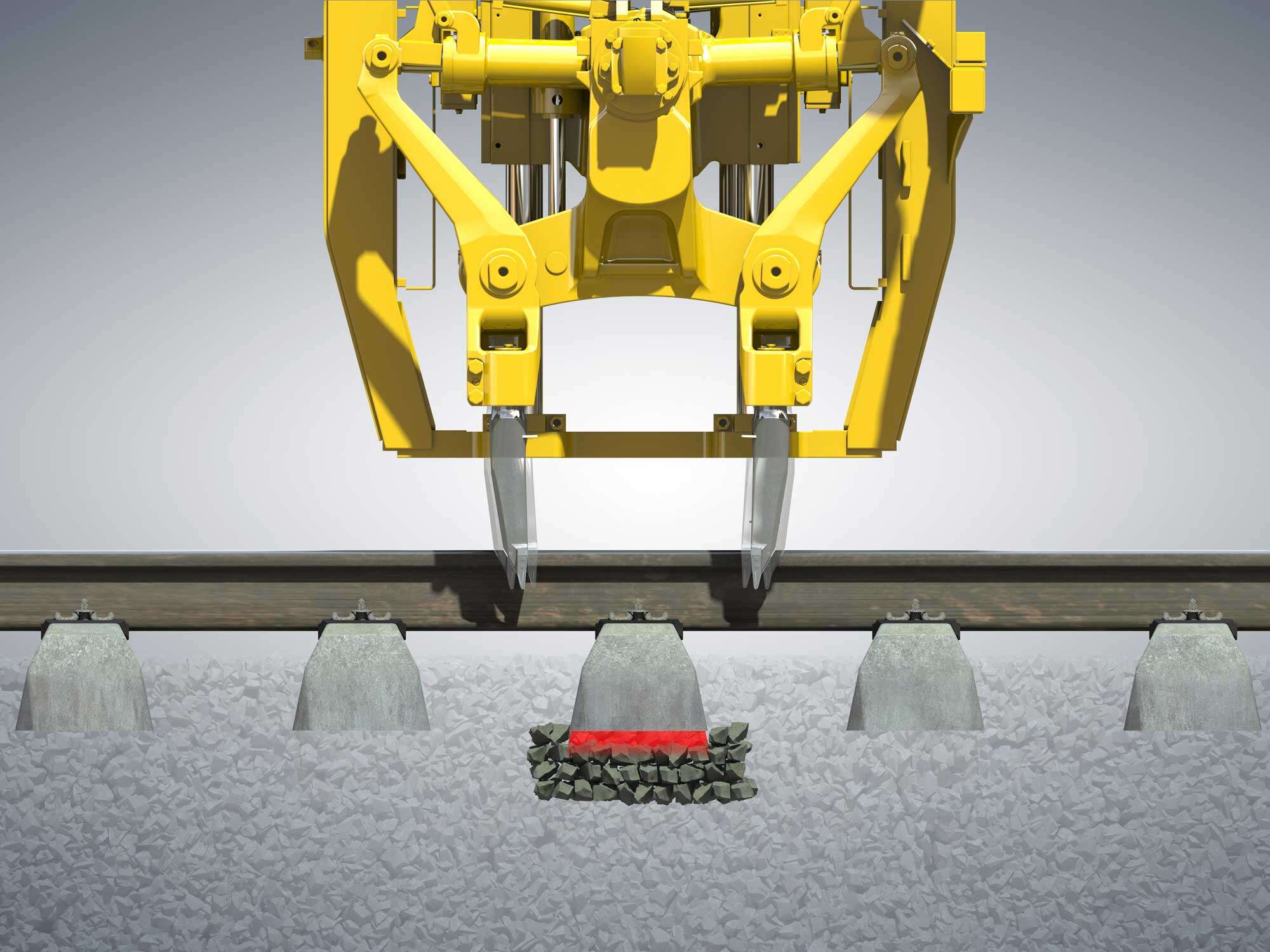
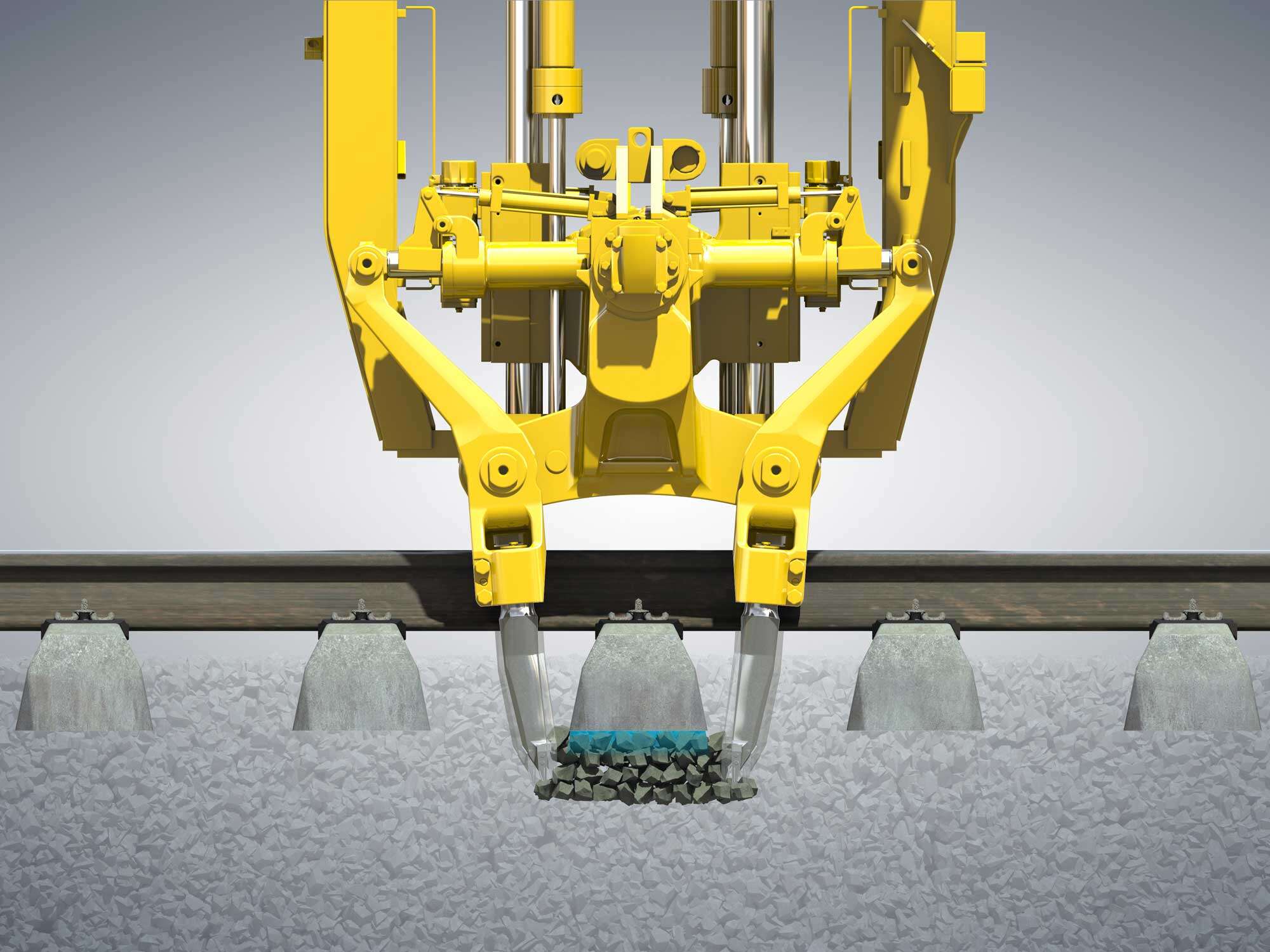
> Squeezing
During squeezing, which is divided into filling and compaction, the tamping tines opposite each other are moved towards each other. This is superimposed by a vibration with a frequency of 35 Hz.
> Filling
During lifting and lining, a void is created under the sleeper. The void is filled with ballast in the first phase of the squeezing process to create a new sleeper bed. The squeezing movement transports ballast under the sleeper in a controlled manner. Plasser TampingControl – VoidDetection enables this process to be monitored and is able to detect whether there are any insufficiently filled sleepers, i.e. when there is an insufficient amount of ballast.
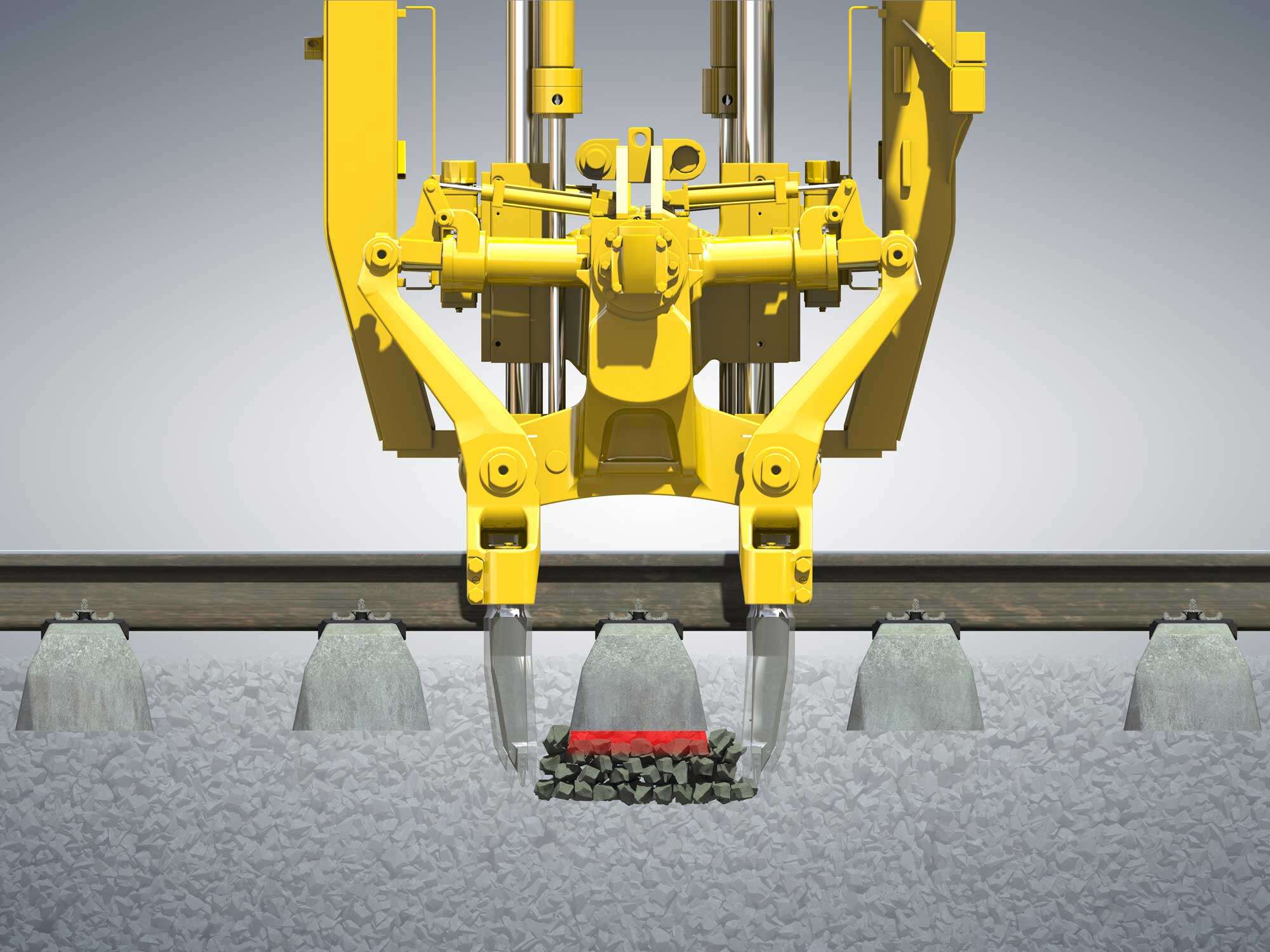
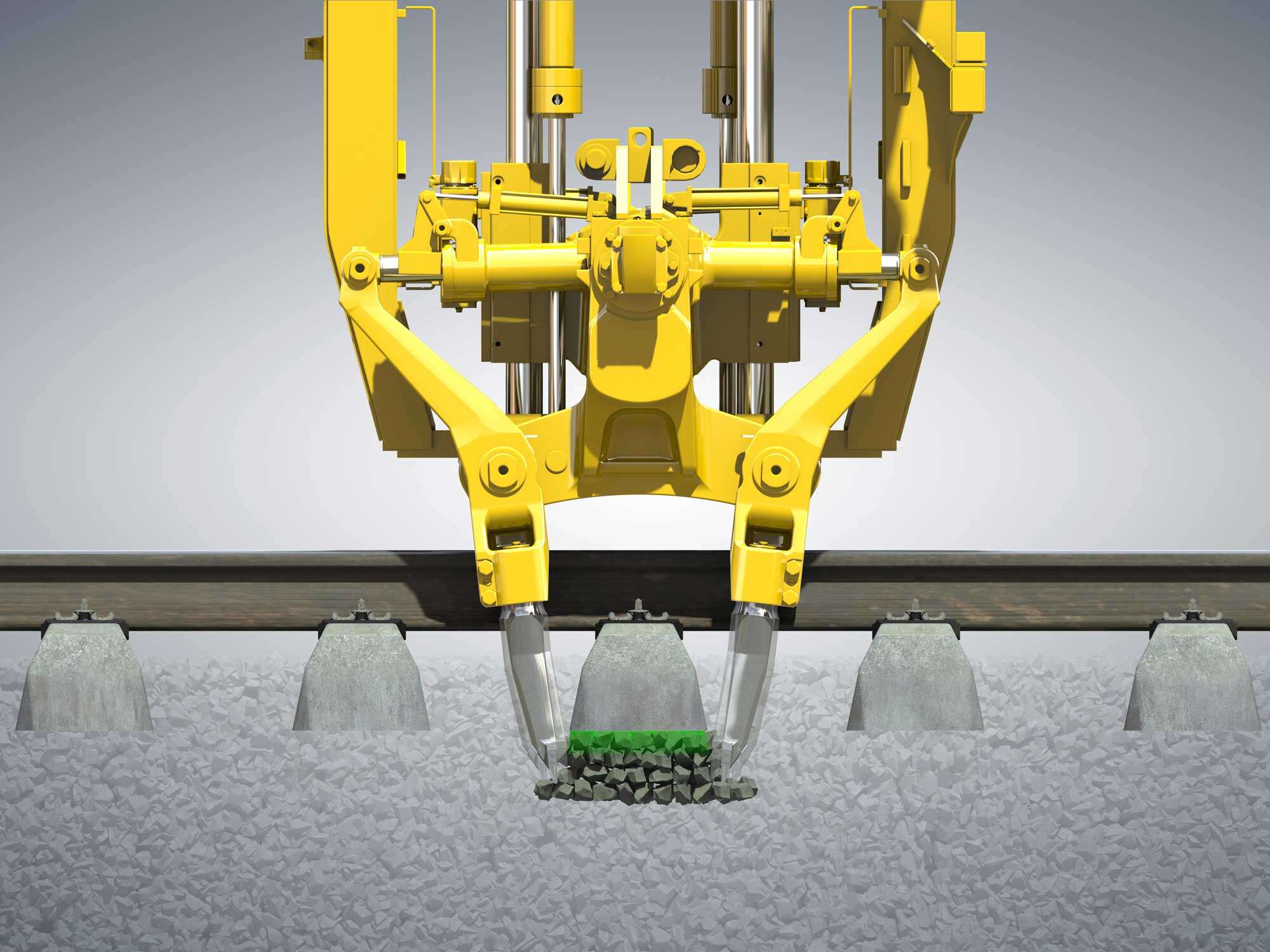
> Compacting
In order to guarantee the most stable track position possible, the ballast structure under the sleeper is compacted through the vibration of the tamping tines. As a result, the sleeper remains in the desired position after tamping and the restored track position allows safe operation. Thanks to the vibrating tamping tines, the individual ballast grains are rearranged with increased compaction.
> Withdrawing
Once the squeezing process is completed, the tamping tines are opened again. The vibration during the lifting process ensures that the space occupied by the tamping tines is refilled with ballast. The tamping cycle is now completed. The satellite or the entire machine continues running and the tamping cycle starts again. The frequency control reduces noise and fuel consumption in the lifted state.